THE MOTIVATION & VISION
Farmers rely on the use of herbicide as it is a time-efficient and economic solution to fight weeds. However, herbicide usage has emerged to become an environmental problem worldwide. In Switzerland, measurements have shown contaminated ground water in almost all regions with agriculture.
We are driven to find a sustainable solution to this problem and organic farming is the way to go. Presently, this approach requires a large amount of work which results in high consumer prices leading to less demand for organic products. Our vision is to promote organic farming by creating a herbicide-free and economic solution. Hence, making farming more sustainable.
To reach this goal, we are developing an autonomous weeding robot which uses vision recognition to identify and destroy weeds. The result? A user-friendly and time-efficient weeding system that enables farmers to counter herbicide overuse.
In order to turn this vision into a reality, we have put together a team of ten highly motivated students, eight expert coaches and supportive sponsors at ETH Zurich. Together, we have created ROWESYS – Robotic Weeding System
THE CURRENT SITUATION
A lot has happened since the last review in the beginning of December. We currently are working from home trying our best to make our robot a reality despite the current circumstances. Nevertheless have we made huge progress and are excited to see our robot fully developed in summer. Here is where we stand currently with our robot.
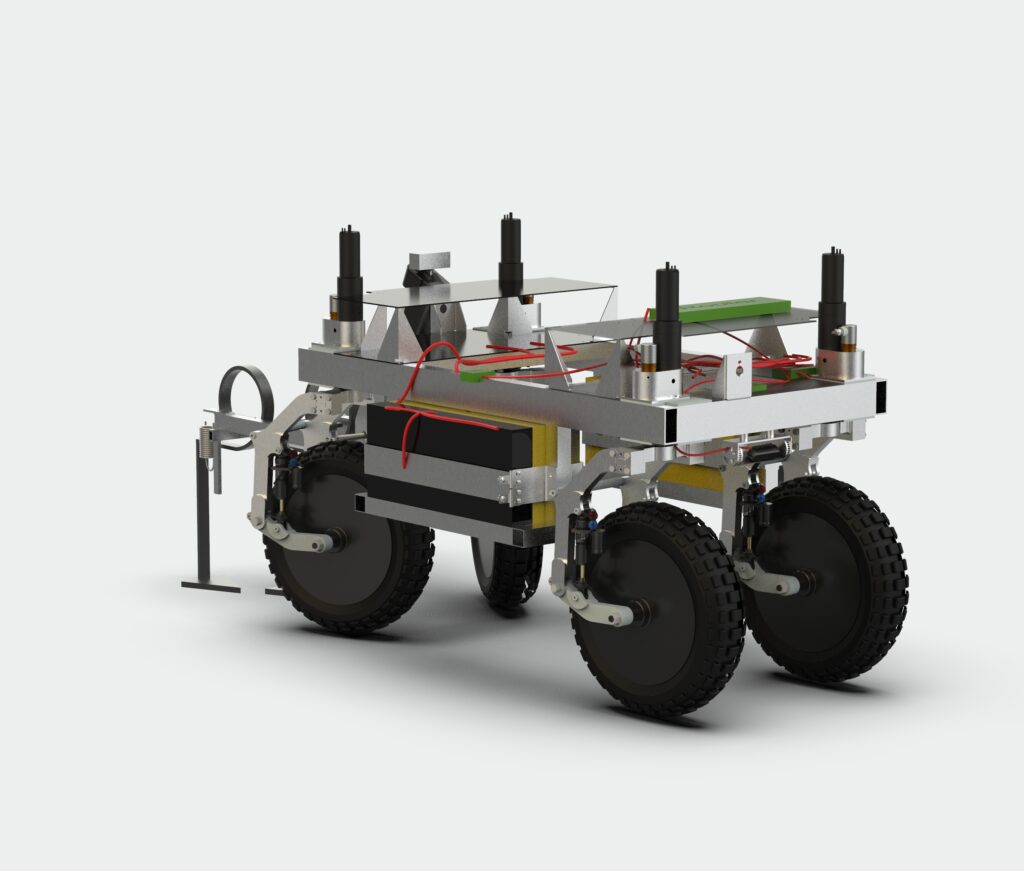
Different sub parts are finally designed and mostly assembled. We are finishing up on tuning the small parts and are looking forward to testing. Here is a quick overview over the status of our robot:
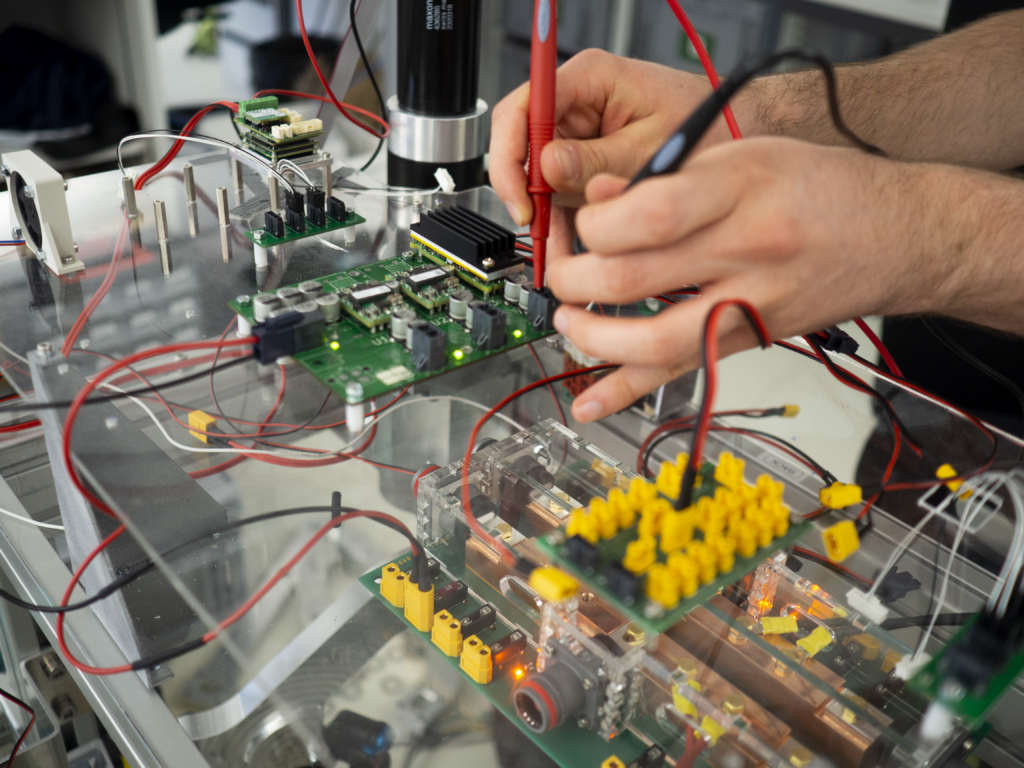
Controls
This powerful motor setup needs some strong drives to be correctly controlled. This is why we chose the “Elmo Motion Control” servo-drives which are very powerful and compact. Furthermore, the board computer needs to quickly send and receive information from the drives. To enable this we chose the EtherCAT field-bus system. We are now creating the software and tuning the system to robustly navigate in the fields.
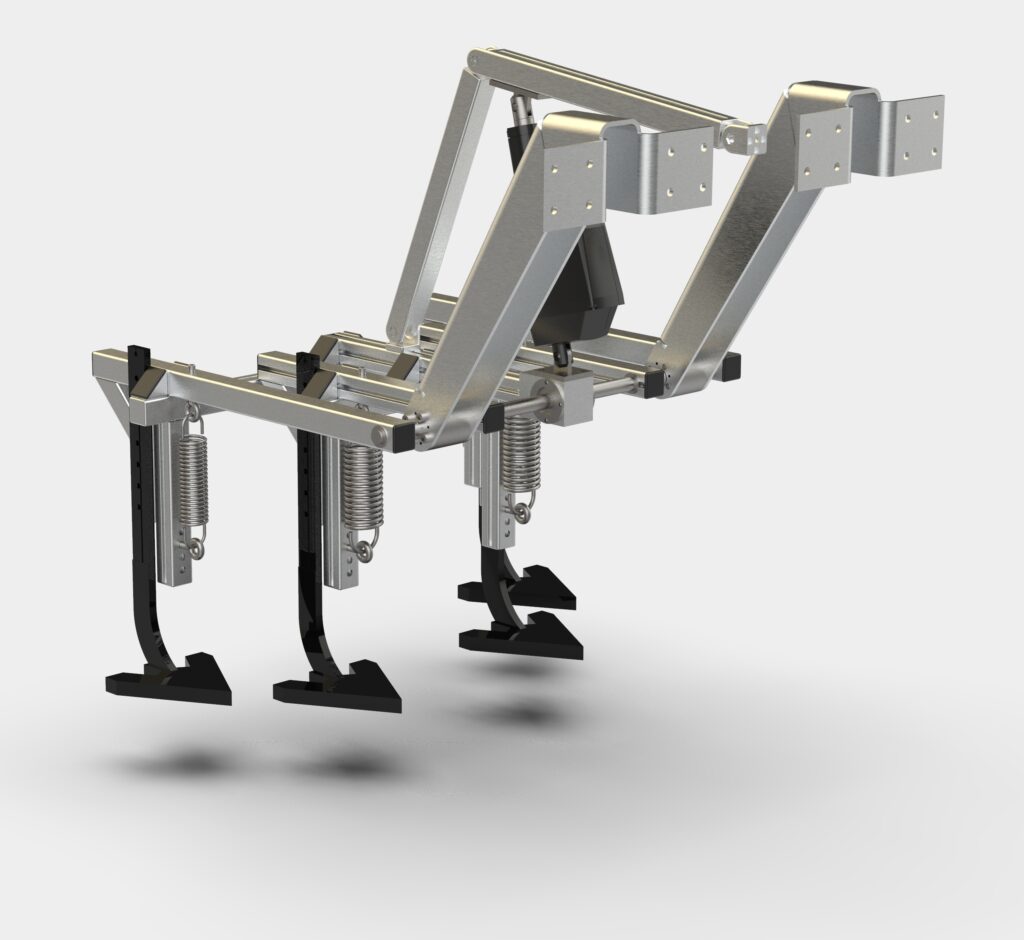
Passive Tool
The passive weeding tool will be used to remove weeds growing between the rows of the planted crops. It consists of an arrangement of so-called goosefoot shares which are individually mounted on a spring-suspended beam. This allows the goosefeet to move out of the ground if they got stuck in the soil. A linear motor from LINAK holds the position of the beam frame and can lift the whole structure up for maneuvering.


Propulsion
The whole propulsion concept is designed to provide constant operating conditions for the cameras and the computer vision software. The robot is propelled by hub motors which deliver enough torque to pull the goosefeet. The traction is delivered by special offroad tires. Together with the sophisticated customized suspension manufactured by Georg Fischer, the exceptional propulsion system holds the item platform as stable as possible under the adverse circumstances on a field.



Vision
The robot navigates using two different sensors: A depth camera as well as a tracking camera. The depth camera is used to extract the position of the robot relative to the row. Also, it provides useful information that can be helpful when weed density is high. For one, the crops are usually higher than the weeds, which will show in the depth information. Also, the depth camera has an additional infrared-channel. In visible light, the weeds and the crops have nearly the same color, while there are significant differences in their infrared-spectrum. The tracking camera with its precise IMU is used to optimize the detection over several frames and to do a precise turn at the end of a row.
Steering mechanism
The steering mechanism of choice is swerve drive. The concept is implemented by allowing each wheel to orient itself independently. This allows for rotating on the spot as well as crab steering which gives the system the means to cope with uneven terrain. To provide the necessary steering torque, maxon motors in combination with maxon planetary gearboxes are implemented. Additionally, for measuring the wheel’s orientation, absolute encoders from the company Baumer are integrated within the steering mechanism.



Casing
Our two industrial Designers are currently working on the design of our casing, making hundreds of sketches and trying to shape the robot.
The casing will be the last part to go into production and will be assembled before the rollout, and after the testing.



THE FOCUS PROJECT
As engineering students in the third year of our bachelor’s degree, ETH Zurich provides us with the unique opportunity to work on a focus project. This project allows us to tackle a technically challenging problem and create a functional prototype from scratch within a period of nine months.
The main goal of each focusproject is to let students experience the whole process of developing a solution for a complex problem from start to finish. Applying theoretical knowledge, structural analysis and learning to work in a team are important skills that students improve on during such a project. To ensure a successful outcome, these endeavors are supervised as well as supported by institutes and experienced coaches at ETH Zurich.
The highlight will be the Rollout, an event where each Team has the opportunity to present and demonstrate the result of their efforts to the public.